Все боялись спросить: роботомобили на грунтовке
23 мая 2016г.
Понятно, что на трассе самоуправляемая машина ищет знаки, разметку и с комфортом едет. Но если яма? Или вообще дорога в Воркуту, например? А что если транспортное средство заносит? Для таких ситуаций искусственный интеллект пока ещё не подготовлен и ограничивается проверенными маршрутами, низкой скоростью и массой алгоритмов перепроверки дорожной обстановки. Но это лишь повод для учёных продолжать свои исследования и эксперименты.
 Методика учёных применяет передовые алгоритмы анализа бортовых вычислительных систем совместно с устройствами зондирования. Цель — повысить стабильность автомобиля при сохранении скорости и производительности двигателя. В этот проект уже вложилось даже военное ведомство США. Именно по финансированию армии состоялся отчёт на Международной конференции по робототехнике и автоматизации (ICRA) на прошлой неделе.
Методика учёных применяет передовые алгоритмы анализа бортовых вычислительных систем совместно с устройствами зондирования. Цель — повысить стабильность автомобиля при сохранении скорости и производительности двигателя. В этот проект уже вложилось даже военное ведомство США. Именно по финансированию армии состоялся отчёт на Международной конференции по робототехнике и автоматизации (ICRA) на прошлой неделе.
Вот, какие заявления прозвучали на ICRA из уст курирующего проект профессора Панайотис Циотрас (Panagiotis Tsiotras):

Изучение опыта раллийных гонщиков.
Технологический институт Джорджии (США) разработал способ сохранения автомобиля под контролем на пределе его управляемости, когда реакции человека уже не хватает. Решение исследователей из Daniel Guggenheim School of Aerospace Engineering и School of Interactive Computing (это всё подразделения института) основано на оценке поведения автомобилей на гоночных соревнованиях (раллийных заездах) со скоростями до 144 км/ч по грунтовым трассам и бездорожью.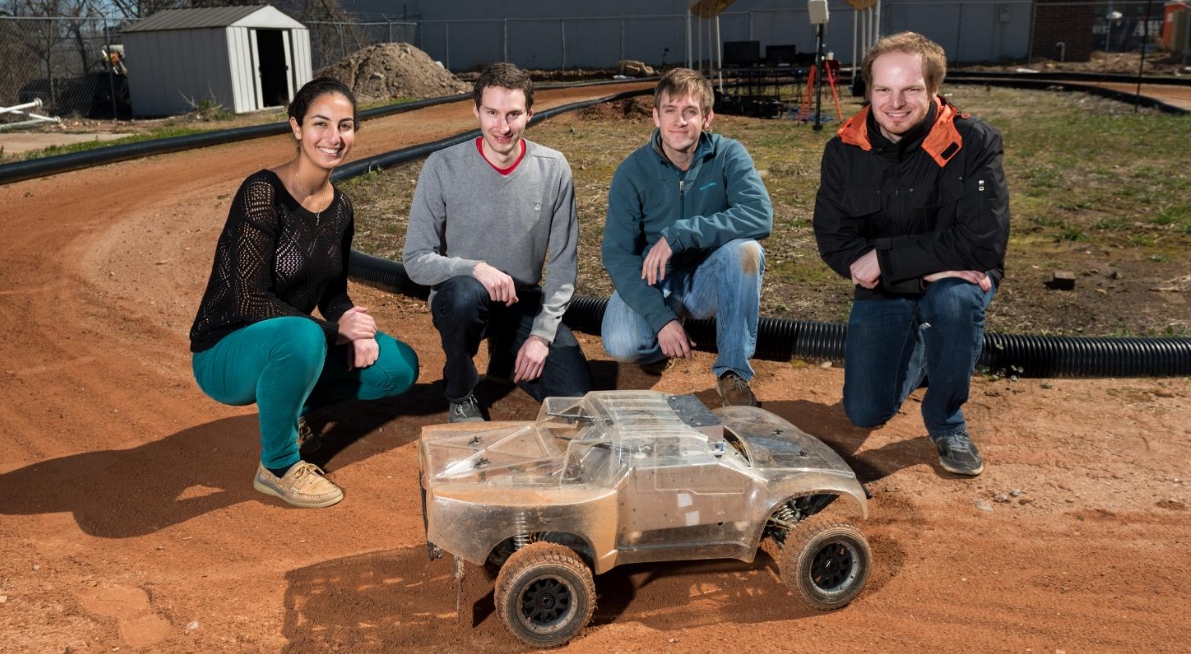
Вот, какие заявления прозвучали на ICRA из уст курирующего проект профессора Панайотис Циотрас (Panagiotis Tsiotras):
Автономный автомобиль должен быть в состоянии обрабатывать любые внешние условия, а не просто ехать по трассе линейно и в идеальном окружении. Одна из наших главных целей заключается в том, чтобы изучить некоторые из экспертных навыков человеческих гонщиков “в мозги” этих автономных транспортных средств.
Как всё это заработает в реальных условиях?
Получившаяся концепция называется так: «Модель интеллектуального пути интегрального управления» (или сокращённо MPPI). Она впитала в себя статистическую физику, теорию управления, машинное обучение и анализаторы внешних данных с видеокамер и различных датчиков, закреплённых на борту автомобиля. Вычисления нагружены на графический процессор (GPU). Его производительности достаточно для взаимодействия со всеми этими параметрами в режиме реального времени и даже немного наперёд (прогноз на будущее) — 2500 операций в 1/60 секунды с предсказанием на 2.5 секунды.Другими словами, MPPI смотрит на дорожную обстановку, зайчиков там всяких, ёлочки на обочине, сравнивает это с показаниями бортовых приборов и затем планирует ход действий, чтобы в конце концов их выполнить последовательно и без ошибок с неостанавливающейся корректировкой по датчикам. И вот эти самые алгоритмы взяты не с неба, а из «головы» и привычек профессиональных гонщиков и экспертов раллийных гонок. И такие автомобили уже смогут ездить самостоятельно без человеческого водителя даже в Воркуту.Почему спешка в роботизации автомобилей может привести к непредсказуемым последствиям? Мнение автоконцернов